.webp)
.webp)

自動運転分野のシミュレーション チームは、増大するシミュレーション量と拡大する地理的カバレッジを支えるため、HD マッピング インフラのスケーリング課題に直面しています。同時に、車載 HD マップが廃れつつある中でもシミュレーションの価値を維持するため、現実世界を忠実に再現したデジタルツインとしての地図が必要とされます。従来のシステムは巨大なファイルと集中型サービスに苦戦し、ワークフローを遅延させ、予測不可能なリソース不足を生み出します。自動運転の野心が加速する中、エンジニアリング チームは包括的なテストと迅速な反復に必要な地図データの複雑性と規模の増大に対処しています。
HD マップは、自動運転車両のシミュレーションと安全検証の基盤を提供します。その理由を理解するには、消費者向けナビゲーション アプリでおなじみの標準精細 (SD) マップとの対比が役立ちます。後者は基本的な道路形状と経路案内を提供し、ターンバイターン案内には十分ですがが、現実的な仮想テストや車線レベルでの自動運転に必要な詳細度には欠けます。対照的に HD マップはセンチメートル単位の精度で、車線境界、標高変化、複雑な都市環境のあらゆるニュアンスを捉えるセマンティックな詳細をマッピングします。
前回、我々はハイブリッド SD/HD マッピング戦略を検証し、複合レイヤーが ADAS と自動運転ユースケースをどう推進するか、また車両スタック上で大規模な HD マップを維持する難しさを指摘しました。同ブログでは、ハイブリッド手法が実運用では SD データに依存しつつ、重要な場面で HD コンテキストを活用するチーム支援策でもあることを示しました。
その基盤を踏まえ、本稿ではスケーラブルで現実的なシミュレーションが実現する過程、移行からエンジニアリング チームが得た知見、そしてマッピング革新の方向性などシミュレーション向けクラウドネイティブ HD マップ アーキテクチャ構築の技術的旅路を深く掘り下げます。マップサービス アーキテクチャの進化、主要なクラウド ネイティブ原則、最近の移行事例から得られたベストプラクティス、実世界の成果を網羅します。これらの知見が一体となり、マッピング技術の進化を推進します。
マッピング アーキテクチャの進化と技術革新
初期の自動運転システムはモノリシックな HD マップファイルに依存していました。これらの資産はスケーラビリティと柔軟性の面で急速に限界に達しました。SD マップはコンパクトさと更新の容易さを提供しますが、レーン追従や複雑なシミュレーション シナリオといった重要な機能のサポートには不十分です。HD マップはより高い精度を提供しますが、数ギガバイト規模のファイルサイズはスケーリングを困難にします。特に、全国規模のフルフィデリティールートを必要とする高速道路プログラムでは顕著です。
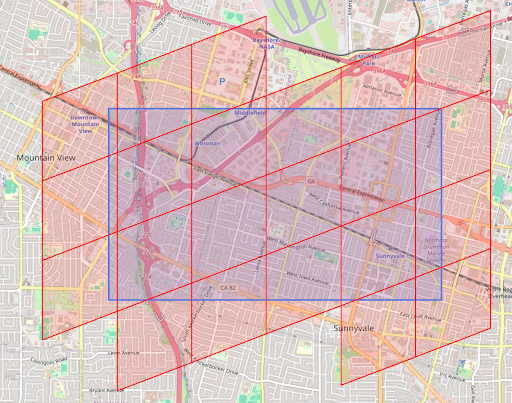
タイル型 HD マッピングは転換点となりました。巨大な地図を多数の小さなタイルに分割することで、プラットフォームは各領域を独立して保存・検索・更新できます。これはゲームエンジンやリアルタイム ナビゲーションシステムが近傍の世界チャンクのみをストリーミングする仕組みに類似しています。Applied Intuition は Google の S2 ライブラリを用いてこのタイリングを実装し、世界を階層的なセルに分割します。各セルに安定した識別子を割り当てることで、空間検索を高速かつ効率的に実現しています。クラウド インフラへのタイル保存により、地図データは従来のファイルサービスや限定的なデータベースから解放されました。あらゆる規模のシミュレーションが関連領域のみにアクセスするため、地球規模や国境を越えたシナリオが実用化されます。
モジュール式タイリングはハイブリッドかつ迅速な更新ソリューションを実現します。個々のタイルはシステムを中断せずに更新・刷新されます。シナリオのカバー範囲が拡大するにつれ—ローカルルートから大陸全体を跨ぐ仮想マイルまで—アーキテクチャは拡張性を発揮します。
スケーラビリティのための構築: クラウドネイティブ原則の実践
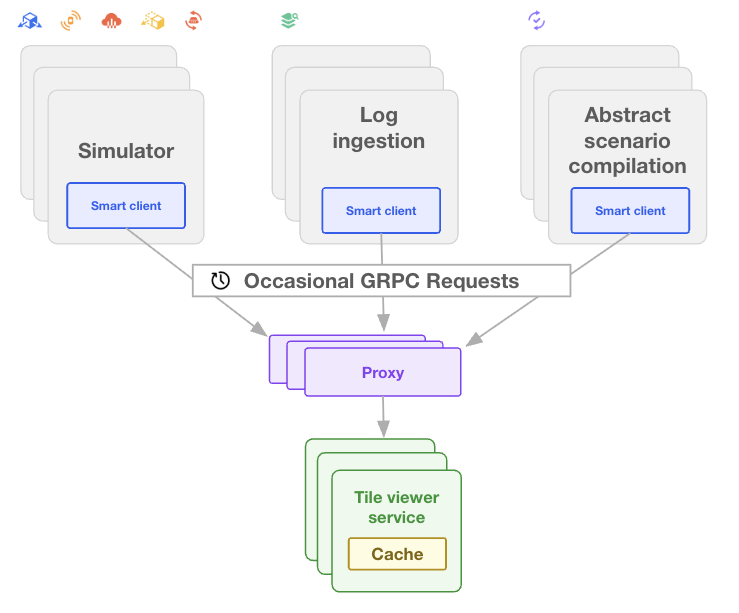
HD マップをクラウド ネイティブモデルに移行するには、分散サービスと並列ワークフローが必要です。このアーキテクチャでは、ストレージとコンピューティングを分離しています。シミュレーションノードは必要な処理のみを実行し、巨大なマップファイルをメモリに読み込むことはありません。代わりに「マップ アズ ア サービス」設計が採用されています。単一責任で水平スケーラブルなタイルビューアサービスは、クラウドストレージ (S3 など) から必要なタイルのみを取得し、読み込んで各シミュレーションノードに即座にコンテンツを配信します。
主要な構成要素:
- 並列マップ取り込み: システムは事前に、ベクター、地形、セマンティック レイヤーなどのマップレイヤーを生成・組み立てるため、非同期で実行される並列取り込みジョブを開始します。
- プロキシ化されたタイルビューア サービス: ストレージとシミュレーションの間に位置するこのプロキシ サービスは、高トラフィックのタイルを賢くキャッシュし、リクエストを効率的にルーティングし、スティッキー ロード バランシングに依存して、繰り返されるクエリがメモリ内のタイルを再利用できるようにします。
- リソース効率性: 高トラフィック顧客において、従来システム比で約 99 % のマップ提供関連コンピューティング コスト削減を実現します。
このモデルにより、チームは特定地域でのテスト実施、全世界での 1 日 100 万回シミュレーション実行、あるいはあらゆる顧客ニーズに応じたカバレッジ拡張が可能となります。マップデータをタイル化し並列パイプラインを構築することで、エンジニアリング チームはリソースのボトルネックを継続的最適化の機会へと転換します。
移行の教訓とシミュレーション主導のベストプラクティス
Applied Intuition がタイル化・クラウドネイティブのマッピング スタックへ移行した過程で得られたスケーラビリティを追求するエンジニアリング チームにとって重要な教訓:
- スケーラビリティを前提に設計を開始すべきです。開発者環境やローカルクラスターでの動作検証は、数万の同時シミュレーション下でのシステム挙動をほとんど示しません。真の負荷テストのみが、大規模環境で顕在化する固有の障害モードやボトルネックを暴きます。
- 精密な計測と堅牢なメトリクスは全段階で重要です。利用データとワークフローパターンの追跡により、エンジニアは後方互換性が真に重要な箇所とそうでない箇所を特定できました。レガシー機能の互換性維持ではなく顧客価値を駆動する機能に焦点を当てることで、チームはデリバリーを加速し移行を簡素化しました。
- ロールアウトは段階的かつ慎重に行うのが最善策です。全顧客ベースを一括切り替えする代わりに、Applied Intuition はクラウドネイティブ HD マップをまず選定顧客に展開しました。このアプローチにより組織リスクを抑制し、初期フィードバックに基づく迅速な反復の余地を確保しました。
- シミュレーション プラットフォームには固有の要件が存在します。ナビゲーションや ADAS とは異なり、シミュレーションには空間精度の最大化、迅速な反復、多様なシナリオにわたるオーケストレーションが求められます。モジュール化されたタイル型 HD マップにより、検証チーム、センサーシミュレーションチーム、ミッション プランニングチームといった専門チームは必要なタイルのみを要求できるため、速度と精度の両方が向上します。
段階的な展開の優先、詳細なメトリクスの収集、シミュレーション要件に特化した設計といったこれらの移行手法は、将来のイノベーションの基盤を築きます。マッピング技術が進化し続ける中、拡張性とメトリクスを中核に据えて構築するチームこそが、自動運転のための堅牢で適応性の高いソリューションを提供する最良の立場にあるのです。
実世界の成果と業界背景
クラウドネイティブ HD マッピングは、大規模で測定可能な持続的影響を生み出しました。Applied Intuition が S2 タイリングやモジュラーストレージといったアーキテクチャの進歩を採用すると、いくつかの重要な改善が実現しました。
多くの顧客でシミュレーションのスループットが倍増し、数週間かかっていた仮想マイル数百万の処理を数日で可能にしました。メモリ使用量が縮小し、計算リソースが需要の変化に動的に適応したことで、チームのインフラコストは低下しました。信頼性も連動して向上し、シミュレーションの実行時間とコスト見積もりの予測可能性が高まりました。この一貫性がエンジニアリングの生産性を促進し、より確信を持ったリソース計画を可能にします。
これらの成果は理論上のものに留まりません。Applied Intuition の顧客は、大陸を跨ぎ複数チームに分散した大規模シナリオ負荷を実行します。分散型タイル化マッピングがボトルネックとリソース競合を解消しました。このアプローチは具体的な運用価値をもたらし、かつて技術的限界に直面していたシナリオも、ハイパースケール環境で円滑に実行可能になりました。
業界全体で、クラウド ネイティブのマッピングはより大きな潮流に組み込まれています。本稿はシミュレーションインフラの拡張に焦点を当てますが、同様の原則がリアルタイム SD/HD レイヤー統合やダイナミック地図更新の基盤となります。自動運転の変化のペースが加速する中、モジュール式タイリングと効率的なパイプラインは、新興車両フリート、AI ドリブンの更新、次世代道路状況に必要な急速な進化を支えます。
スケーラブルで適応性の高いマッピングに早期投資する自動運転プログラムは、革新性と回復力の基盤を築きます。複雑な地図を検証・更新し、グローバルな車両群に展開する能力は、業界リーダーにとって急速に不可欠な差別化要因となりつつあります。
Applied Intuition では、これらの進歩によりイノベーション サイクルの加速、シミュレーション シナリオの拡大、そして自動運転の最も困難な課題に取り組む技術人材にとって魅力的な環境が実現しています。Applied Intuition のマッピング チームへの参加にご興味のある方はこちらよりお問い合わせしてください。
